TSC-3PO Mk2
Technische Details
3D Kamera:
Stereolabs ZED mit NVIDIA Jetson TX2
Sensoren:
LiDAR Velodyne Puck VLP-16, Vectornav VN-200 INS
Programmiersprachen:
C++, Python, Matlab/Simulink
Libraries:
OpenCV, ROS, Point Cloud Library
L/B/H: 2705 mm / 1370 mm / 1102 mm
Radstand: 1530 mm
Gewicht: 230 kg
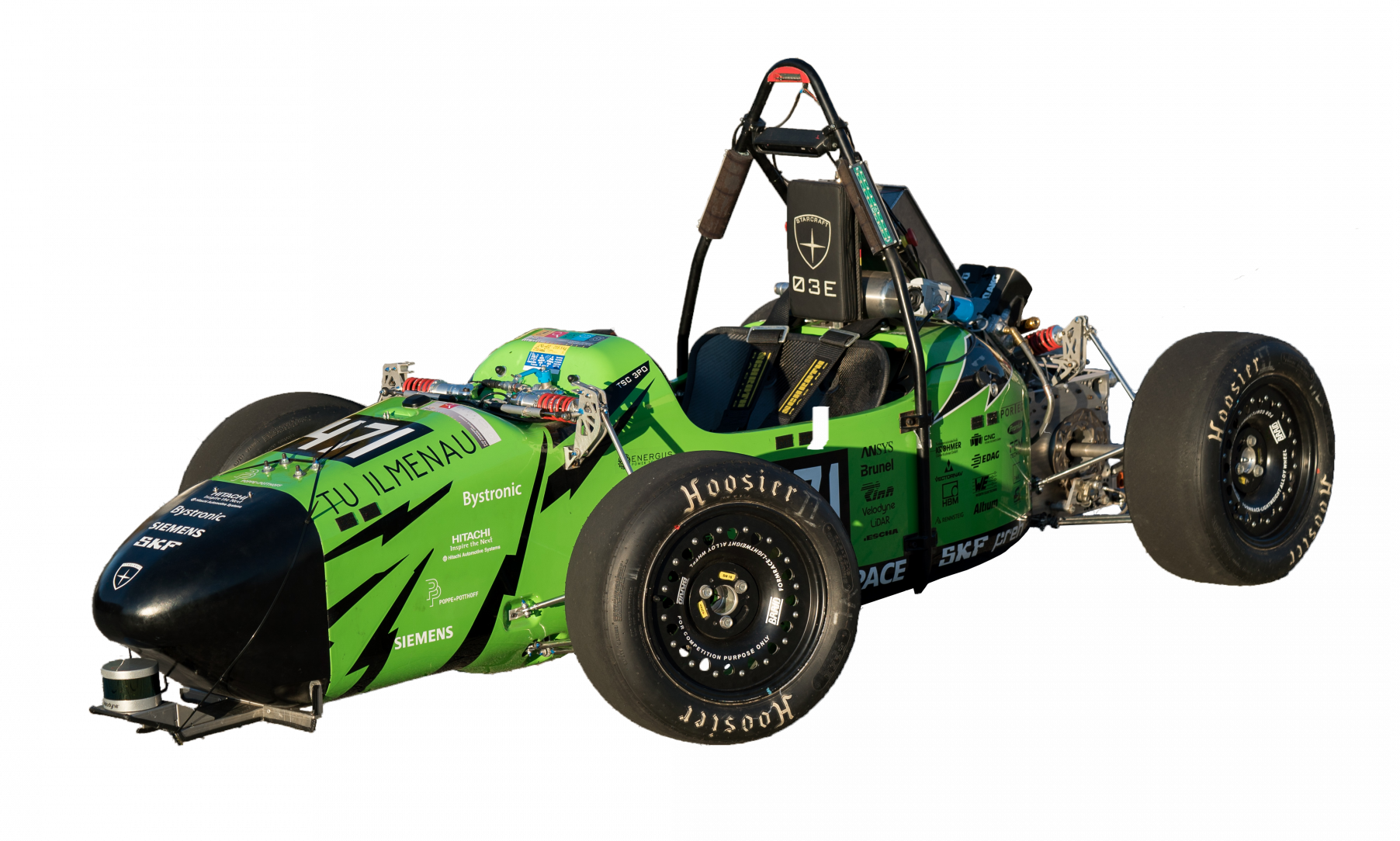
Bei Einführung der Driverless-Klasse in der Formula Student im Jahr 2017 entschlossen wir uns von Anfang an dabei zu sein, um einen weiteren Schritt in Richtung Zukunft zu gehen und Pionierarbeit im aktuell spannendsten Bereich der Automobilindustrie zu leisten. Als Basis für die Teilnahme und die Implementierung der autonomen Systeme diente das Electric-Fahrzeug TSC-03E von 2016. Für den Umbau mussten Konzepte gefunden werden, die die Aufgaben des Fahrers regelkonform durch Aktoren ersetzen. Die erste Version des TSC-3PO nutzte für die Bilderkennung nur einfache Kameras. Beim überarbeiteten 3PO Mk2 konnte die Streckenerkennung durch eine hochwertige Stereokamera und einen Laserscanner (LiDAR) deutlich verbessert werden. Die mit Leitkegeln markierte Rennstrecke wird dabei von der Stereokamera in Farbe und Tiefe aufgenommen. Mit Hilfe des Laserscanners und der Verarbeitung in einem neuronalen Netz wird die Strecke erkannt und ein Kurs berechnet. Ziel ist es die Erkennungsqualität zu erhöhen und die Latenzen zu verringern.
Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.